라이다(LiDAR)란? Lidar는 레이더 거리 측정 기능과 카메라 각도 해상도를 결합하여 정확한 깊이 인식 감지 기능을 제공하여 이미지를 완성합니다(그림 1).

그림 1: 카메라, 레이더 및 라이더는 자율 주행을 위해 선택되는 세 가지 기술입니다. (이미지 제공: ADI)
시각적 부분은 카메라 또는 운전자 가시성, 객체 분류 및 측면 해상도를 나타냅니다. 어둠과 눈, 먼지 또는 비와 같은 기상 조건은 이러한 능력을 손상시킬 수 있습니다. 레이더 부분은 RF 신호의 반환을 나타냅니다. 이 신호는 기상 조건과 어둠의 영향을 받지 않으며 거리도 측정합니다. LiDAR 부분은 추가 객체 분류, 측면 해상도, 범위 지정 및 어두운 침투를 제공하여 감지 사진을 완성할 수 있습니다.
라이더는 어떻게 작동합니까?
LiDAR 시스템의 기본 요소에는 구형파 송신기 시스템, 대상 환경 및 환경의 외부 요소까지의 거리를 해석하는 데 사용되는 광학 수신기 시스템이 포함됩니다. LiDAR 센싱 방법은 펄스 레이저 형태의 빛을 사용하여 반환된 신호의 비행 시간(ToF)을 분석하여 범위를 측정합니다(그림 2).
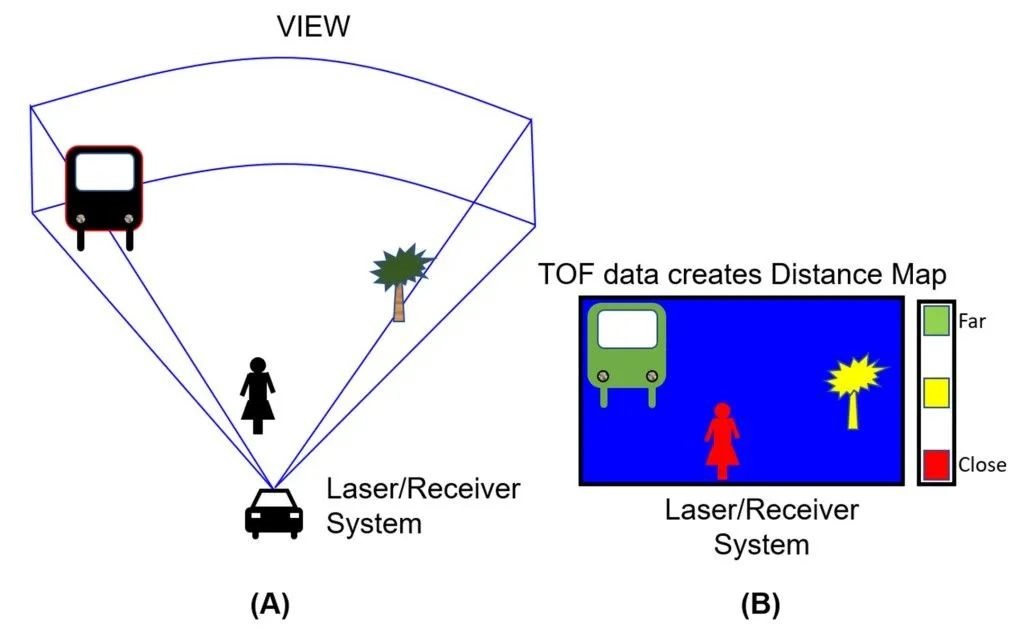
그림 2: 각 라이더 전송 장치에는 삼각형 "시야"가 있습니다. (이미지 제공: 보니 베이커)
거리의 도면은 광학 디지털 신호에 따라 다릅니다.
디지털 도메인의 신호
LiDAR의 회로 솔루션은 자동차 전치 증폭기를 통한 신호 수신 문제를 해결하는 것입니다. 입력 단계는 광검출기에서 음의 입력 전류 펄스를 받아들이는 데 사용됩니다(그림 3).

그림 3: LiDAR의 전자 부품은 레이저 다이오드 송신기와 2개의 광다이오드 수신기로 구성됩니다. (이미지 제공: 보니 베이커)
레이저 다이오드는 유리 조각을 통해 디지털 펄스를 전송합니다. 이 신호는 D2 포토다이오드에도 반영됩니다. 이 신호의 처리는 시스템에 내장된 전송 시간 및 전자 지연을 제공합니다.
디지털 광 신호 펄스는 물체에 닿아 광학 시스템으로 다시 반사됩니다. 돌아오는 펄스는 두 번째 포토다이오드 D1에 미러링됩니다. D1 신호 경로의 전자 부품은 D2 신호 경로와 동일합니다. 두 신호가 마이크로컨트롤러(MCU)에 도달한 후에 비행 시간을 계산할 수 있습니다.
시장 스냅샷
자동차 라이더 시스템은 펄스 레이저 광을 사용하여 두 차량 사이의 거리를 측정합니다. 자동차 시스템은 LiDAR를 사용하여 교통 상황의 급격한 변화에 대응하여 차량 속도 및 제동 시스템을 제어합니다. LiDAR는 충돌 경고 및 회피 시스템, 차선 유지 보조, 차선 이탈 경고, 사각지대 모니터, 적응형 순항 제어와 같은 반자동 또는 완전 자동 차량 지원 기능에서 중요한 역할을 합니다. 자동차 라이더는 이전 차량 자동화 시스템의 레이더 시스템을 대체하고 있습니다. LiDAR 시스템은 몇 미터에서 1,000미터 이상까지 다양합니다.
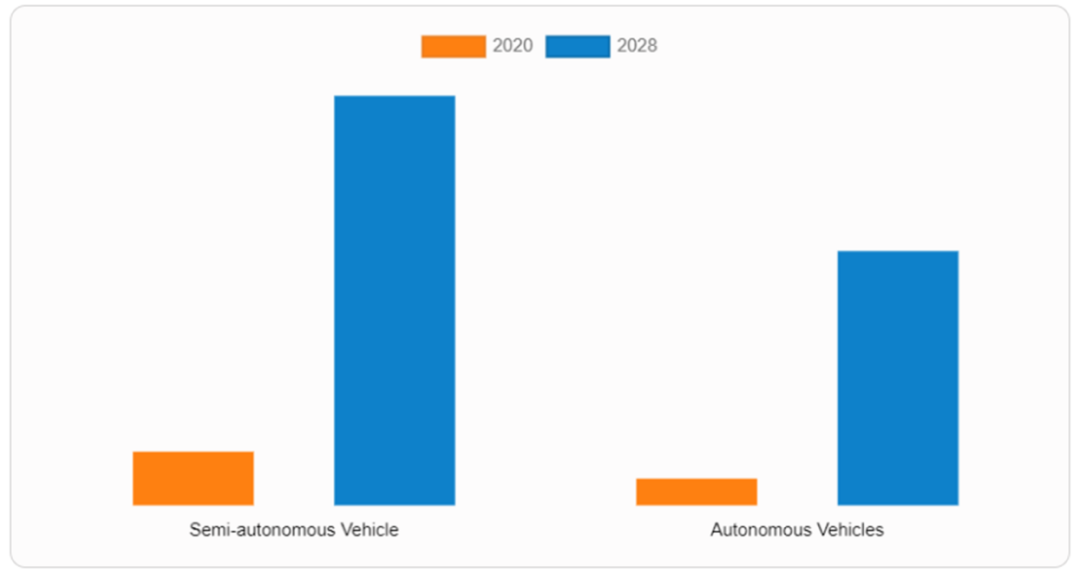
그림 4: 자동차 LiDAR 시장은 반자율 및 완전 자율 차량 애플리케이션으로 구분됩니다. (이미지 출처: Allied Market Research)
자율주행차는 이미 널리 사용되고 있으며 라이더 이미징 시스템은 상황을 더욱 개선할 것입니다. 레이더, 카메라, 라이더 장비는 여전히 반자율 및 완전 자율 주행을 위한 선택 기술이며, 라이더의 가격은 하락하고 있으며 시장은 이러한 변화를 가속화하고 있습니다.
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - 중국 광섬유 모듈, 광섬유 결합 레이저 제조업체, 레이저 부품 공급업체 모든 권리 보유.